Selected Publications
1
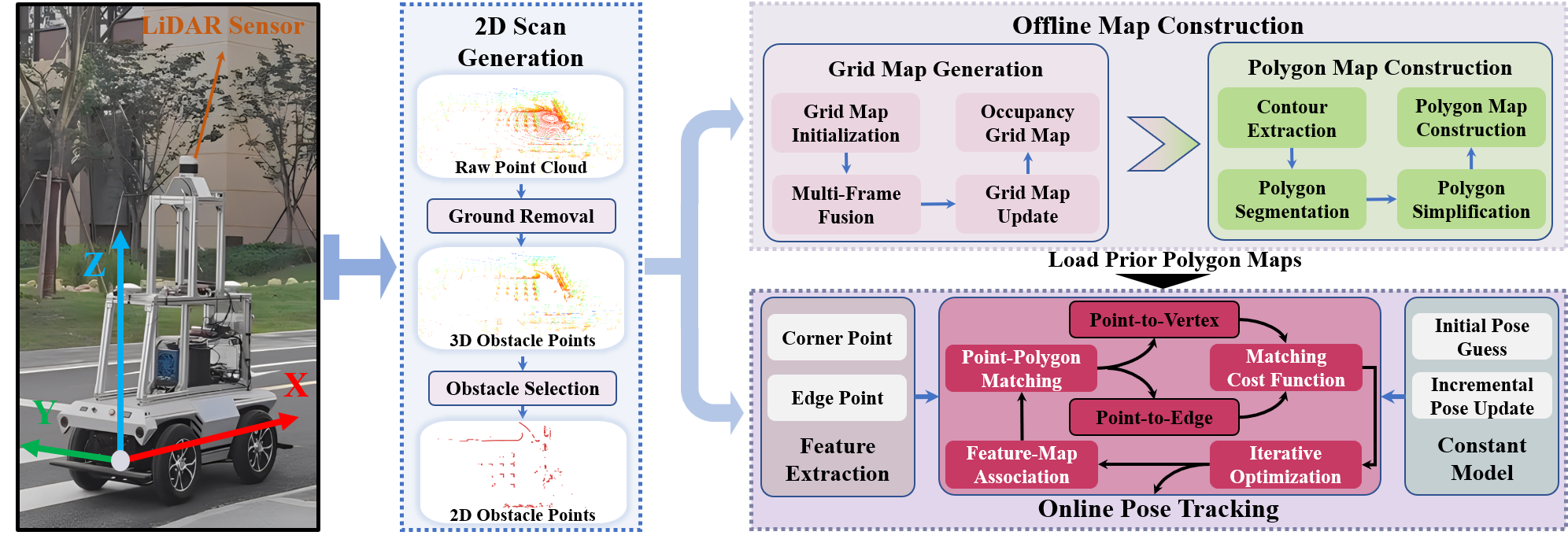
H. Gao, Q. Qiu, H. Liu, D. Liang*, C. Wang, and X. Zhang, ERPoT: Effective and reliable pose tracking for mobile robots using lightweight polygon maps
IEEE Transactions on Robotics, 2025, 41: 3799-3819
2
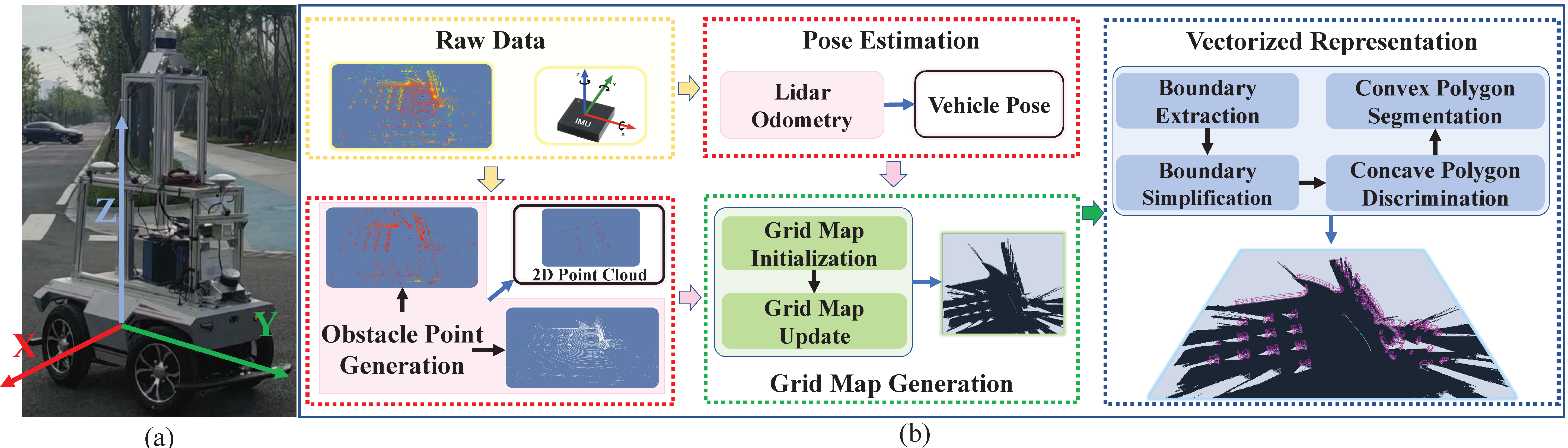
H. Gao, Q. Qiu, W. Hua*, X. Zhang, Z. Su, S. Zhang, CVR-LSE: Compact vectorized representation of local static environments for reliable obstacle detection
IEEE Transactions on Industrial Electronics, 2024, 71(8): 9309-9318
3
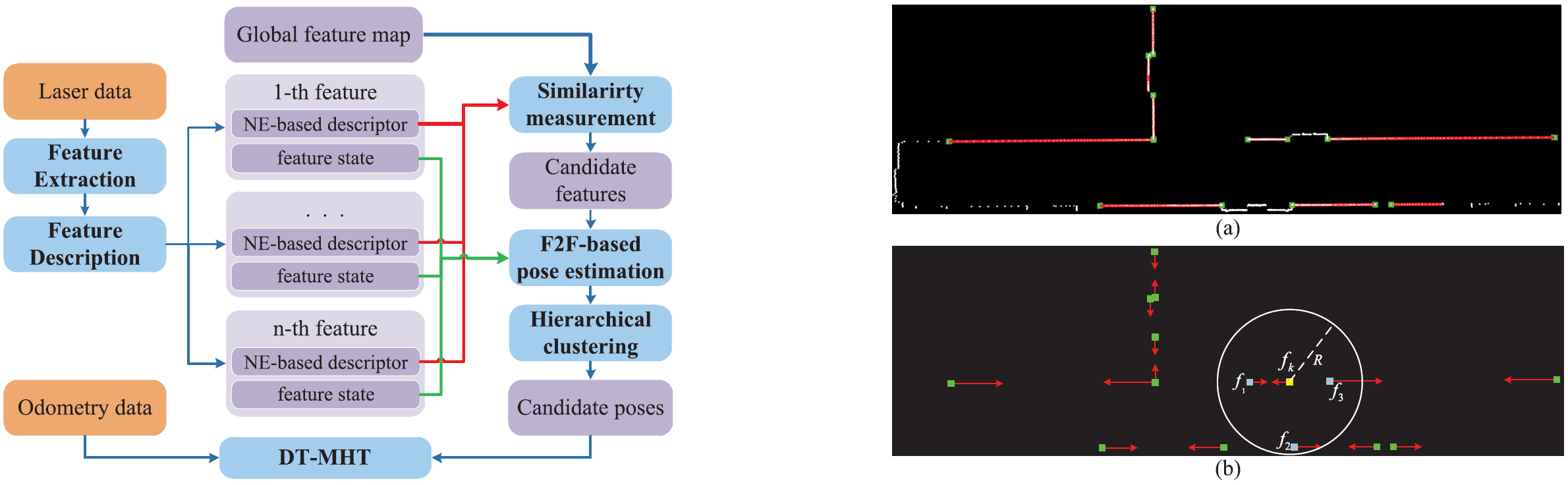
H. Gao, X. Zhang*, J. Yuan, and Y. Fang. NEGL: Lightweight and efficient neighborhood encoding-based global localization for unmanned ground vehicles
IEEE Transactions on Vehicular Technology, 2023, 72(6): 7111-7122
4
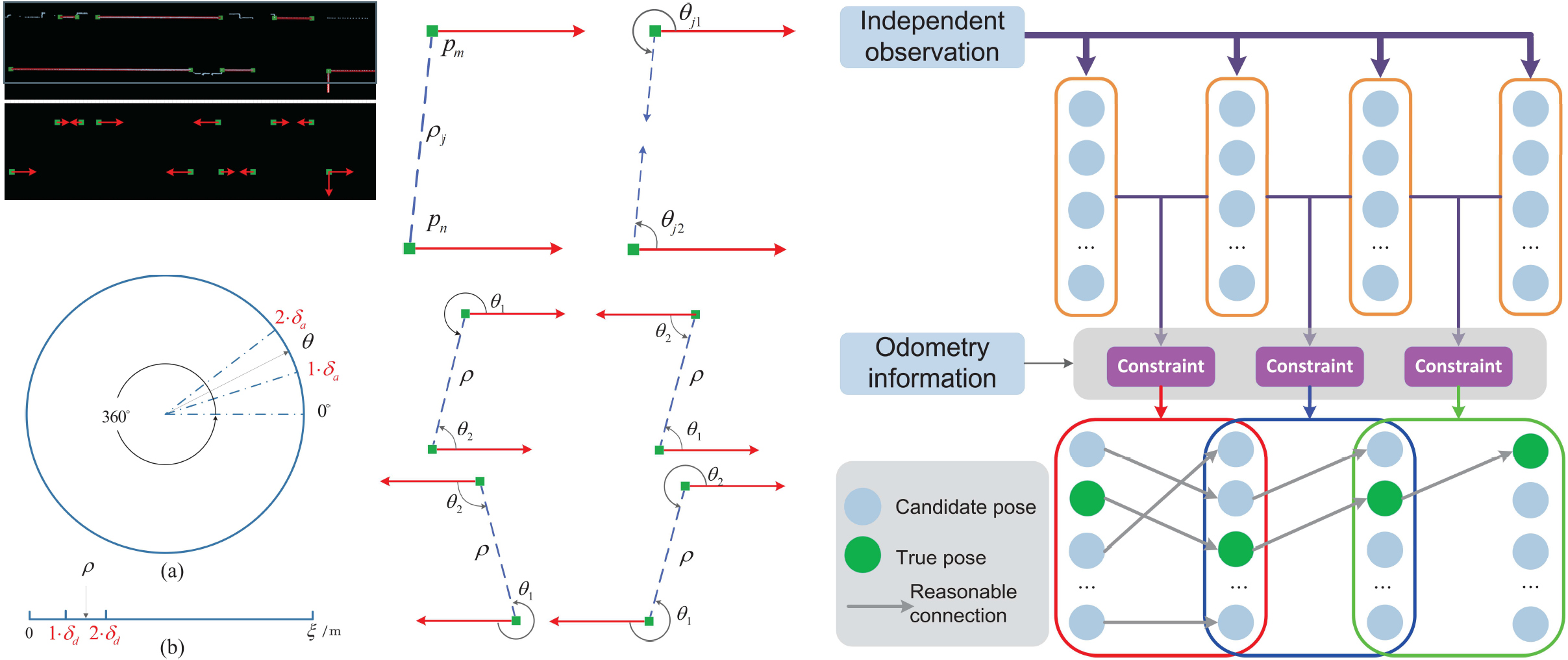
H. Gao, X. Zhang*, J. Yuan, J. Song, and Y. Fang. A novel global localization approach based on structural unit encoding and multiple hypothesis tracking
IEEE Transactions on Instrumentation and Measurement, 2019, 68(11): 4427-4442
5
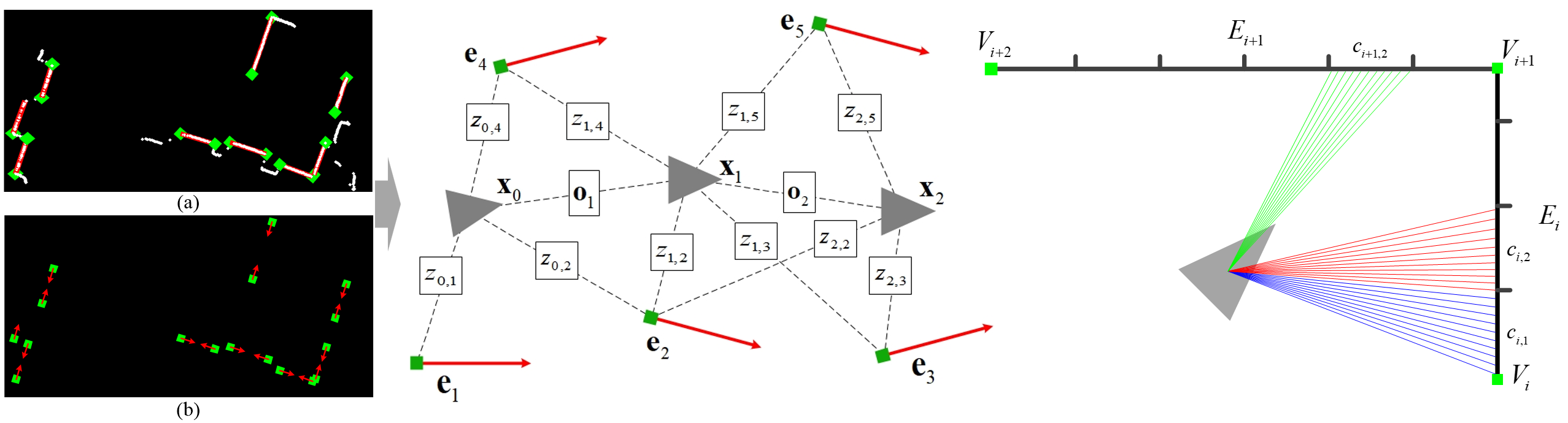
H. Gao, X. Zhang*, J. Wen, J. Yuan, and Y. Fang. Autonomous indoor exploration via polygon map construction and graph-based SLAM using directional endpoint features
IEEE Transactions on Automation Science and Engineering, 2019, 16(4): 1531-1542
6
H. Gao, X. Zhang*, Y. Fang, and J. Yuan. A line segment extraction algorithm using laser data based on seeded region growing
International Journal of Advanced Robotic Systems, 2018, 15(1): 1-10
Most Read Articles
7
Q. Qiu, W. Wang, H. Ying, D. Liang, H. Gao*, and X. He. Stacked asymmetric convolution and selective feature fusion for large-scale point cloud-based place recognition
Knowledge-Based Systems, 2024, 295: 111794
8
H. Gao, X. Zhang*, C. Li, X. Chen, Y. Fang, and X. Chen. Directional endpoint-based enhanced EKF-SLAM for indoor mobile robots
IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 978-983, 2019
9
H. Gao, Q. Qiu, S Zhang, W. Hua*, Z. Su, and X. Zhang. MPC-MF: Multi-point cloud map fusion based on offline global optimization for mobile robots
2023 Chinese Control Conference (CCC), pp. 4237-4242, 2023
10
Q. Qiu, H. Yang, J. Jiang, S. Zhang, H. Ying, H. Gao, W. Wang, and X. He. M³CS: Multi-target masked point modeling with learnable codebook and siamese decoders
IEEE Transactions on Circuits and Systems for Video Technology, 2025, doi: 10.1109/TCSVT.2025.3553525
11
Y. Song, R. Wang, Q. Bi, Z. Pan, H. Gao, and X. Zhang. STVO: Spatial-temporal constrained velocity obstacle for safe navigation among pedestrians
IEEE Transactions on Vehicular Technology, 2025, doi: 10.1109/TVT.2025.3565734
12
H Liu, H. Gao, J. Shi, C. Xu, D. Qu, and W. Hua. APMC-LOM: Accurate 3D LiDAR odometry and mapping based on pyramid warm-up registration and multi-constraint optimization
IEEE Transactions on Vehicular Technology, 2024, 73(12): 18266-18282
13
Q. Qiu, H. Gao, W. Hua, G. Huang, and X. He. PriorLane: A prior knowledge enhanced lane detection approach based on transformer
IEEE International Conference on Robotics and Automation (ICRA), pp. 5618-5624, 2023
14
J. Wen, X. Zhang*, H. Gao, J. Yuan, and Y. Fang. E³MoP: Efficient motion planning based on heuristic-guided motion primitives pruning and path optimization with sparse-banded structure
IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 2762-2775
15
C. Li, X. Zhang*, H. Gao, R. Wang, and Y. Fang. Bridging the gap between visual servoing and visual SLAM: A novel integrated interactive framework
IEEE Transactions on Automation Science and Engineering, 2022, 19(3): 2245-2255
16
J. Wen, X. Zhang*, H. Gao, J. Yuan, and Y. Fang. CAE-RLSM: Consistent and efficient redundant line segment merging for online feature map building
IEEE Transactions on Instrumentation and Measurement, 2020, 69(7): 4222-4237
17
Q. Qiu, S. Zhang, H. Gao, H. Yang, H. Ying, W. Wang, and X. He. EMVP: Embracing visual foundation model for visual place recognition with centroid-free probing
Advances in Neural Information Processing Systems (NeurIPS), 2024, 37: 120928-120950
18
Y. Zhu, W. Lu, G. Ren, H. Gao, S. Vougioukas, Y. Ying, and C. Peng. Optimal scheduling of a dual-arm robot for efficient strawberry harvesting in plant factories
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1231-1238, 2025
19
周光召, 苑晶*, 高海明, 孙沁璇, 张雪波, 俞诗卓. 结构化环境下基于结构单元软编码的3维激光雷达点云描述子
机器人, 2020, 42(06): 641-650
20
J. Song, H. Gao, X. Zhang*, W. Lin, and J. Liu. A global localization algorithm for mobile robots based on grid submaps
IEEE International Conference on Advanced Robotics and Mechatronics, pp. 201-206, 2018
Best Conference Paper Finalist
21
J. Wen, X. Zhang*, H. Gao, J. Yuan, and Y. Fang. A novel 2D laser scan matching algorithm for mobile robots based on hybrid features
IEEE International Conference on Real-time Computing and Robotics, pp. 366-371, 2018
Best Paper Award Finalist
22
J. Wang, X. Zhang*, H. Gao, and Y. Fang. Time-optimal motion planning for a nonholonomic mobile robot on a barcode map
IEEE International Conference on Robotics and Biomimetics, pp. 215-220, 2017
... and more publications in progress