Welcome to My Academic Page

Haiming Gao (高海明)
![]()
![]()
![]()
![]()
Biography
I received the B.S. degree in mechanical engineering and automation from Hohai University in 2015, and the Ph.D. degree in control science and engineering from RaHAIC (Robot Autonomy and Human-AI Collaboration), the Institute of Robotics and Automatic Information System, Nankai University in 2020, supervised by Prof. Xuebo Zhang. My research interest includes localization and mapping for mobile robots.
From July 2020 to July 2021, I worked as a Senior Algorithm Engineer in IAS BU (Huawei Intelligent Automotive Solution), with research interests including freespace extraction, APA (Auto Parking Assist), and AVP (Automated Valet Parking). From July 2021 to February 2025, I was a research scientist (Associate Professor) at Zhejiang Lab. Currently, I am a Principal Investigator at the Hangzhou Global Innovation and Technology Center of Zhejiang University (ZJU-HIC). My research interests include localization and perception for intelligent vehicles and mobile robots.
Selected Grants
- 2024.01-2026.12, Self-organizing Spatio-temporal Scene Graph Construction Towards Global Localization of Mobile Robots under Dynamic and Ambiguous Environments, 62303428, PI, National Natural Science Foundation of China.
Selected Publications
-
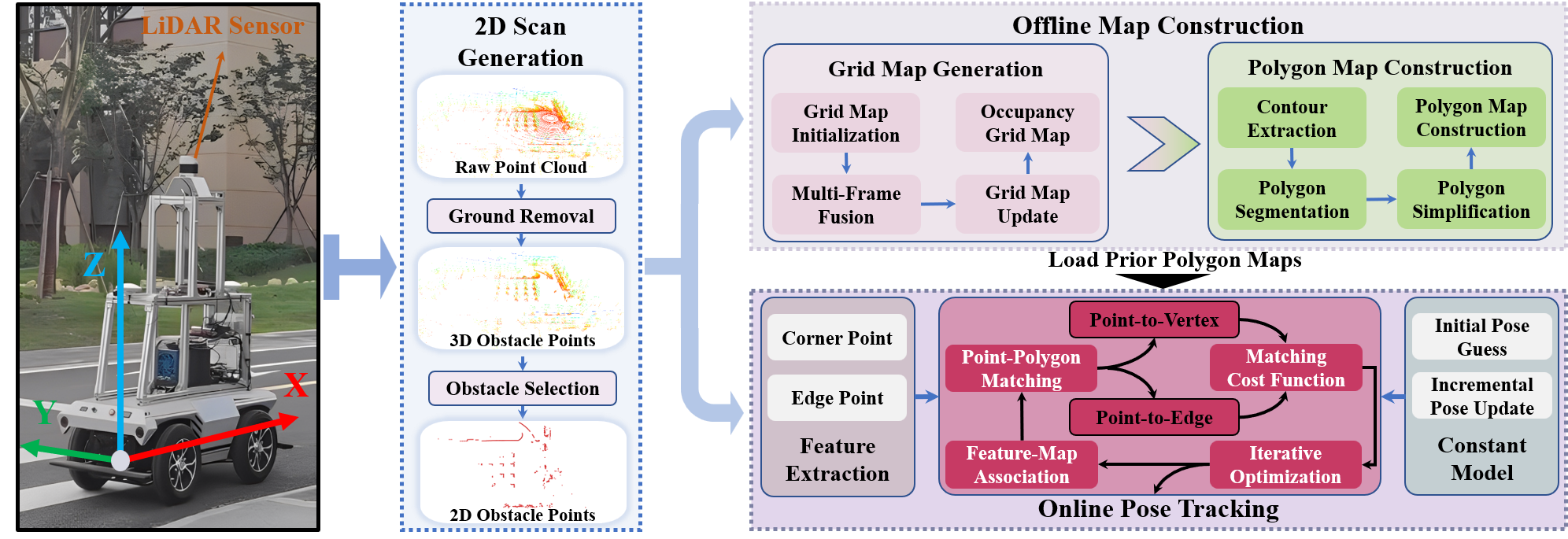
[1] H. Gao, Q. Qiu, H. Liu, D. Liang*, C. Wang, and X. Zhang, ERPoT: Effective and reliable pose tracking for mobile robots using lightweight polygon maps, IEEE Transactions on Robotics, 2025, 41: 3799-3819. [paper] [code] [video]
-
[2] H. Gao, Q. Qiu, W. Hua*, X. Zhang, Z. Su, S. Zhang, CVR-LSE: Compact vectorized representation of local static environments for reliable obstacle detection. IEEE Transactions on Industrial Electronics, 2024, 71(8): 9309-9318. [paper] [code]
-
[3] H. Gao, X. Zhang*, J. Yuan, and Y. Fang. NEGL: Lightweight and efficient neighborhood encoding-based global localization for unmanned ground vehicles, IEEE Transactions on Vehicular Technology, 2023, 72(6): 7111 - 7122. [paper]
-
[4] H. Gao, X. Zhang*, J. Yuan, J. Song, and Y. Fang. A novel global localization approach based on structural unit encoding and multiple hypothesis tracking, IEEE Transactions on Instrumentation and Measurement, 2019, 68(11): 4427-4442. [paper] [video]
-
[5] H. Gao, X. Zhang*, J. Wen, J. Yuan, and Y. Fang. Autonomous indoor exploration via polygon map construction and graph-based SLAM using directional endpoint features, IEEE Transactions on Automation Science and Engineering, 2019, 16(4): 1531-1542. [paper] [video]
-
[6] H. Gao, X. Zhang*, Y. Fang, and J. Yuan. A line segment extraction algorithm using laser data based on seeded region growing, Int. Journal of Advanced Robotic Systems, 2018, 15(1): 1-10. [paper] [code] [video] (Most read articles)
-
[7] Q. Qiu, W. Wang, H. Ying, D. Liang, H. Gao*, and X. He. Stacked asymmetric convolution and selective feature fusion for large-scale point cloud-based place recognition. Knowledge-Based Systems, 295: 111794, 2024. [paper]
-
[8] H. Gao, X. Zhang*, C. Li, X. Chen, Y. Fang, and X. Chen. Directional endpoint-based enhanced EKF-SLAM for indoor mobile robots, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 978-983, 2019. [paper] [navigation demo]
-
[9] H. Gao, Q. Qiu, S Zhang, W. Hua*, Z. Su, and X. Zhang. MPC-MF: Multi-point cloud map fusion based on offline global optimization for mobile robots, 2023 Chinese Control Conference (CCC), pp. 4237-4242, 2023. [paper]
-
[10] Q. Qiu, H. Yang, J. Jiang, S. Zhang, H. Ying, H. Gao, W. Wang, and X. He. M³CS: Multi-target masked point modeling with learnable codebook and siamese decoders, IEEE Transactions on Circuits and Systems for Video Technology, 2025, doi: 10.1109/TCSVT.2025.3553525. [paper]
-
[11] Y. Song, R. Wang, Q. Bi, Z. Pan, H. Gao, and X. Zhang. STVO: Spatial-temporal constrained velocity obstacle for safe navigation among pedestrians. IEEE Transactions on Vehicular Technology, 2025, doi: 10.1109/TVT.2025.3565734. [paper] [video]
-
[12] H Liu, H. Gao, J. Shi, C. Xu, D. Qu, and W. Hua. APMC-LOM: Accurate 3D LiDAR odometry and mapping based on pyramid warm-up registration and multi-constraint optimization, IEEE Transactions on Vehicular Technology, 2024, 73(12): 18266 - 18282. [paper] [code]
-
[13] Q. Qiu, H. Gao, W. Hua, G. Huang, and X. He. PriorLane: A prior knowledge enhanced lane detection approach based on transformer, IEEE International Conference on Robotics and Automation (ICRA), pp. 5618-5624, 2023. [paper] [code]
-
[14] J. Wen, X. Zhang*, H. Gao, J. Yuan, and Y. Fang. E³MoP: Efficient motion planning based on heuristic-guided motion primitives pruning and path optimization with sparse-banded structure, IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 2762-2775. [paper]
-
[15] C. Li, X. Zhang*, H. Gao, R. Wang, and Y. Fang. Bridging the gap between visual servoing and visual SLAM: A novel integrated interactive framework, IEEE Transactions on Automation Science and Engineering, 2022, 19(3): 2245-2255. [paper]
-
[16] J. Wen, X. Zhang*, H. Gao, J. Yuan, and Y. Fang. CAE-RLSM: Consistent and efficient redundant line segment merging for online feature map building, IEEE Transactions on Instrumentation and Measurement, 2020, 69(7): 4222-4237. [paper]
-
[17] Q. Qiu, S. Zhang, H. Gao, H. Yang, H. Ying, W. Wang, and X. He. EMVP: Embracing visual foundation model for visual place recognition with centroid-free probing, Advances in Neural Information Processing Systems(NeurIPS), 2024, 37: 120928-120950.
-
[18] Y. Zhu, W. Lu, G. Ren, H. Gao, S. Vougioukas, Y. Ying, and C. Peng. Optimal scheduling of a dual-arm robot for efficient strawberry harvesting in plant factories, 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1231-1238, 2025. [paper]
-
[19] 周光召,苑晶*,高海明,孙沁璇,张雪波,俞诗卓.结构化环境下基于结构单元软编码的3维激光雷达点云描述子[J]. 机器人,2020,42(06):641-650. [论文]
-
[20] J. Song, H. Gao, X. Zhang*, W. Lin, and J. Liu. A global localization algorithm for mobile robots based on grid submaps, IEEE International Conference on Advanced Robotics and Mechatronics, pp. 201-206, 2018. (Best Conference Paper Finalist) [paper]
-
[21] J. Wen, X. Zhang*, H. Gao, J. Yuan, and Y. Fang. A novel 2D laser scan matching algorithm for mobile robots based on hybrid features, IEEE International Conference on Real-time Computing and Robotics, pp. 366-371, 2018. (Finalist for the Best Paper Award) [paper]
-
[22] J. Wang, X. Zhang*, H. Gao, and Y. Fang. Time-optimal motion planning for a nonholonomic mobile robot on a barcode map, IEEE International Conference on Robotics and Biomimetics, pp. 215-220, 2017. [paper]
-
…
Awards
-
2025.01, Outstanding Reviewers of 2024, IEEE Instrumentation and Measurement Society
-
2023.12, Excellent Employee, Zhejiang Lab
-
2021.01, Excellent New Employee, Huawei Intelligent Automotive Solution
-
2020.06, Outstanding Graduate Award, Nankai University
-
2019.10, Merit Student Award, Nankai University
-
2019.05, Best Poster Award, The First Artificial Intelligence Conference and Entrepreneurs Summit Forum of Chinese Optics Valley, Wuhan, China
-
2018.08, Finalist for the Best Paper Award, IEEE RCAR, Maldives, Aug. 2018
-
2018.07, Best Conference Paper Finalist, IEEE ARM, Singapore, July 2018
-
2015.06, Outstanding Graduate Award, Hohai University
-
…
Reviewer
- IEEE Transactions on Industrial Electronics
- IEEE Transactions on Automation Science and Engineering
- IEEE/ASME Transactions on Mechatronics
- IEEE Transactions on Vehicular Technology
- IEEE Transactions on Control Systems Technology
- IEEE Transactions on Industrial Informatics
- IEEE Transactions on Instrumentation and Measurement
- IEEE Transactions on Intelligent Vehicles
- IEEE Transactions on Intelligent Transportation Systems
- Biomimetic Intelligence and Robotics
- IEEE Robotics and Automation Letters
- Artificial Intelligence Review
- IEEE Sensors Journal
- Robotics and Autonomous Systems
- International Journal of Advanced Robotic Systems
- International Journal of Intelligent Robotics and Applications
- IEEE/RSJ IROS/IEEE ICRA
- …..